




 Bilimsel Araştırma Projeleri
Bilimsel Araştırma Projeleri
 Bursatto
Bursatto
 Bütünleşik Yönetim Sistemi (BYS)
Bütünleşik Yönetim Sistemi (BYS)
 Ders Bilgi Paketi
Ders Bilgi Paketi
 e-Kampus
e-Kampus
 E-Kütüphane
E-Kütüphane
 e-Mevzuat
e-Mevzuat
 E-posta
E-posta
 Elektronik Belge Yönetim Sistemi (EBYS)
Elektronik Belge Yönetim Sistemi (EBYS)
 Erasmus+
Erasmus+
 İdari Otomasyon
İdari Otomasyon
 International Students
International Students
 İş Talep Sistemi
İş Talep Sistemi
 Kurumsal Zeka
Kurumsal Zeka
 Laboratuvar Altyapısı
Laboratuvar Altyapısı
 Merkezi Araştırma Laboratuvarı
Merkezi Araştırma Laboratuvarı
 Otomasyon
Otomasyon
 Senato / Yönetim Kurulu Kararları
Senato / Yönetim Kurulu Kararları
 Sürekli Eğitim Merkezi (SEM)
Sürekli Eğitim Merkezi (SEM)
 TEKNOFEST
TEKNOFEST
 Teknopark
Teknopark
 Test Analiz
Test Analiz
 Yemek Hizmetleri
Yemek Hizmetleri

Bursa Teknik Üniversitesi (BTÜ) Mühendislik ve Doğa Bilimleri Fakültesi (MDBF) Fizik Bölümü öğretim üyesi Dr. Öğr. Üyesi Zekeriya Doğruyol ve Dr. Öğr. Üyesi Murat Türemiş'in danışmanlığını yürüttüğü TÜBİTAK 2209 A ve 2209 B projeleri desteklenmeye hak kazandı. Proje yürütücülüğünü BTÜ öğrencileri Dücane Özdemir, Mertcan Şahin, Faruk Akkuş ve Yahya Kaya'nın yaptığı dört projeye Eray Dönmez, Zeki Can Koç, Tunay Çıkcan, Ahmet Korkut, Emirhan Çok, Hasan Yasir Öztürk, Alperen Arda Alp, Mustafa Erhan Portakal, Süeda Cangül, Mahmut Koç, Emir Yalçın, Mustafa Karakuş, Müberra Canbazoğlu, Kadir Yolal, Okan Şener, Mahmut Öğütcü Yusuf Öngel, İsmail Altın, Seray Kader Kutoğlu, Merve Bedir, Oğuzhan Demir, Hasan Umut Yonkuç, Mustafa Göktuğ Çolak, Mohamed Abdinasır Adan ve Koray Aydın ise destek sağlayacak.
GeMüs, Rover, DenÜS ve DETZROB Projeleri Desteklenecek
Ortak yürütülen dört ayrı projenin destekleneceğini dile getiren Dr. Öğr. Üyesi Zekeriya Doğruyol bu projelerden birinin ultrasonik sensörler ile Marmara’da oluşan derin müsilajı tespit eden GeMüs projesi olduğunu dile getirdi. Artan küresel ısınma ve deniz ekosistemi dengesinin bozulması sonucu Marmara Denizi’nde ortaya çıkan müsilajın, sudaki bakteri ve virüs gibi mikroorganizmalar için oldukça uygun bir beslenme habitatı oluşturmaktadır diyen Dr. Öğretim Üyesi Doğruyol, jel benzeri bir yapıya sahip olan bu yapının balıkların solungaçlarını tıkayarak ölümlerine neden olduğunun altını çizdi. Günümüz müsilaj tespit yöntemlerinden birisi olan uydu sistemleri ile inceleme yönteminde su altındaki müsilajın varlığı tespit edilemediğinin aktarıldığı projede, suda yaşayan canlıların hayatını tehlikeye sokacak bu yapının su üstü ve özellikle su altında entegre ultrasonik sensörleri ile tespit edileceğine değinildi. Müsilajın çoğalmadan ve yayılmadan deniz kirliliğinin önüne geçilmesi sağlanacak olan proje ile deniz sağlığının ve habitatının korunması amaçlanıyor.
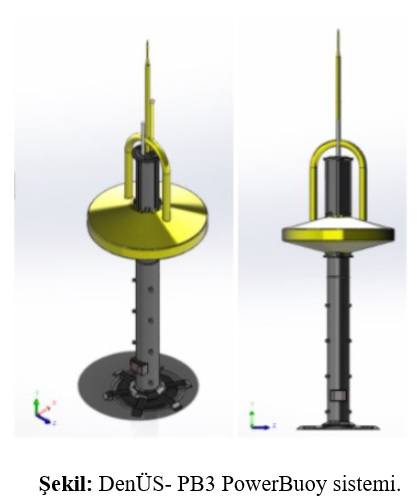
Dalga Enerjisinden Elektrik Enerjisi Üretim Sistemi (DenÜS) Projesi
Desteklenen bir diğer projenin DenÜs Projesi olduğunu belirten Doğruyol, proje ile deniz dalgalarının kinetik enerjisinin kullanılarak temiz enerji üretilmesinin amaçlandığını söyledi. Dünyanın artan nüfusundan kaynaklı olarak artan enerji ihtiyacının insanları çevre dostu, temiz, yenilenebilir ve sınırsız kaynaklardan enerji üretmeye yönlendirdiğine değinen Doğruyol, son yıllarda denize kıyısı olan ülkelerde dalga enerjisinin yenilenebilir enerji kaynağı olarak kullanılmasına yönelik Ar-Ge çalışmalarına hız verildiğini de sözlerine ekledi. Bu proje ile dalga etkisi sonucu yukarı ve aşağı yönlü hareket ederek oluşan mekanik enerjinin, bünyesindeki mekanizmalar kullanılarak, elektrik enerjisine dönüştürülmesi hedefleniyor.
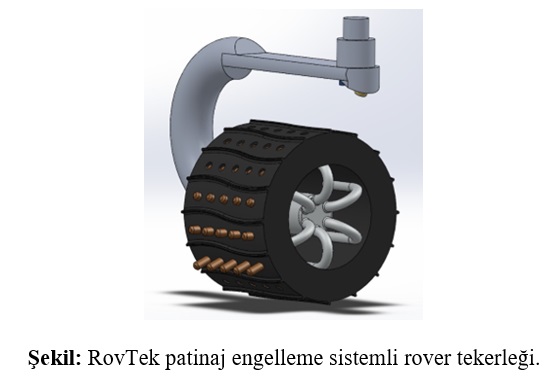
Patinaj Engelleme Sistemli Rover Tekerleği Tasarımı (RovTek) Projesi
Desteklenmeye hak kazanan bir diğer proje olan RovTek projesi ise patinaj engelleme sistemli rover tekerleği ile sorun çözmeyi hedefliyor. NASA’nın Mars’a göndermiş olduğu Spirit, 1 Mayıs 2009 tarihinde pillerinin yeniden şarj olabilmesini engelleyen bir açıyla yumuşak kuma saplandığı ve güneş panelleri yeterli ışık alamadığından görevinin sonlandığını belirten Doğruyol, “Bu sorun keşif araçlarının sıkça karşılaştıkları bir sorundur. Curiosity’de benzer bir sorunla karşılaşmıştır. Küresel Konumlama Sistemi (GPS), kamera sistemi ve sensör sisteminden oluşan Arduino tabanlı bir kontrol sistemi ile RovTek kum derinliğine bağlı olarak tekerlek üzerinde radyal doğrultuda hareket eden parçaları (çivilerin) ile saplandığı yerden kurtulacaktır. RovTek projesi patinaj engelleme sistemli rover tekerleği ile bu sorunu çözmeyi hedeflemektedir.” ifadelerini kullandı.
Su Altı Yapılar İçin İnsansız Görüntülü Hasar Tespit Robotu (DETZROB)
Desteklenmeye hak kazanan bir diğer projenin su altı araçları ile ilgili olduğunu söyleyen Dr. Öğr. Üyesi Doğruyol, DETZROB projesi ile su altındaki betonarme yapılarda hasar tespitini daha az maliyetle daha sık yapılabilmesinin amaçlandığına değindi. Bu projenin insanlı görevlerin başaramayacağı veya maliyetli olduğu durumlarda kullanılmak için geliştirildiğini söyleyen Doğruyol, “DETZROB kablo kontrollü bir su altı aracı (ROV) dır. Kablo kontrollü su altı araçlarının kablosuz su altı araçlarına oranla daha az maliyetli olması ve su altı araçlarında kablosuz haberleşmenin birçok olumsuz yönü bulunması, kablo kontrollü su altı araçlarını daha ekonomik kılmaktadır. Su altı araçları örnek toplama, batık kurtarma ve arkeolojik çalışmalar gibi birçok amaca hizmet etmektedir. Su altı betonarme yapıların periyodik incelemeleri genellikle bir personel tarafından manuel olarak yapılmaktadır. DETZROB ise su altındaki betonarme yapılarda hasar tespitini daha az maliyetle ve sık yapılabilmesini amaçlamaktadır. Bu sayede su altı betonarme yapıların inceleme, bakım ve onarım ihaleleri daha ekonomik hale gelecektir.” ifadelerini kullandı.